

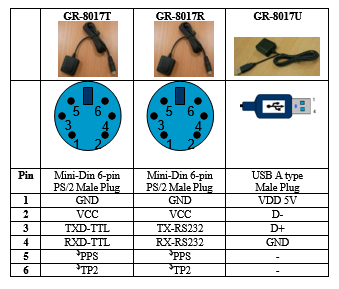
GR-8017U u-blox M8U GNSSレシーバーUSB
¥ 29,700 税込
商品コード:
特徴
パッチアンテナ内蔵一体型GNSSレシーバー u-blox M8U搭載 USB(PL2303)
マルチ受信GNSS GPS/QZSS/Galileo/GLONASS or GPS/QZSS/Galileo/BEIDOU
QZSS L1S SLAS (サブメータ級測位補強サービス) サポート
IMES (屋内測位システム) サポート
補強システム QZSS & SBAS (WAAS, EGNOS, MSAS, GAGAN)
自律航法(ケーブルレス)IMU(慣性計測ユニット)内蔵
入力 RTCM 10402.3 Message 1,2,3,9
防水 IPX7
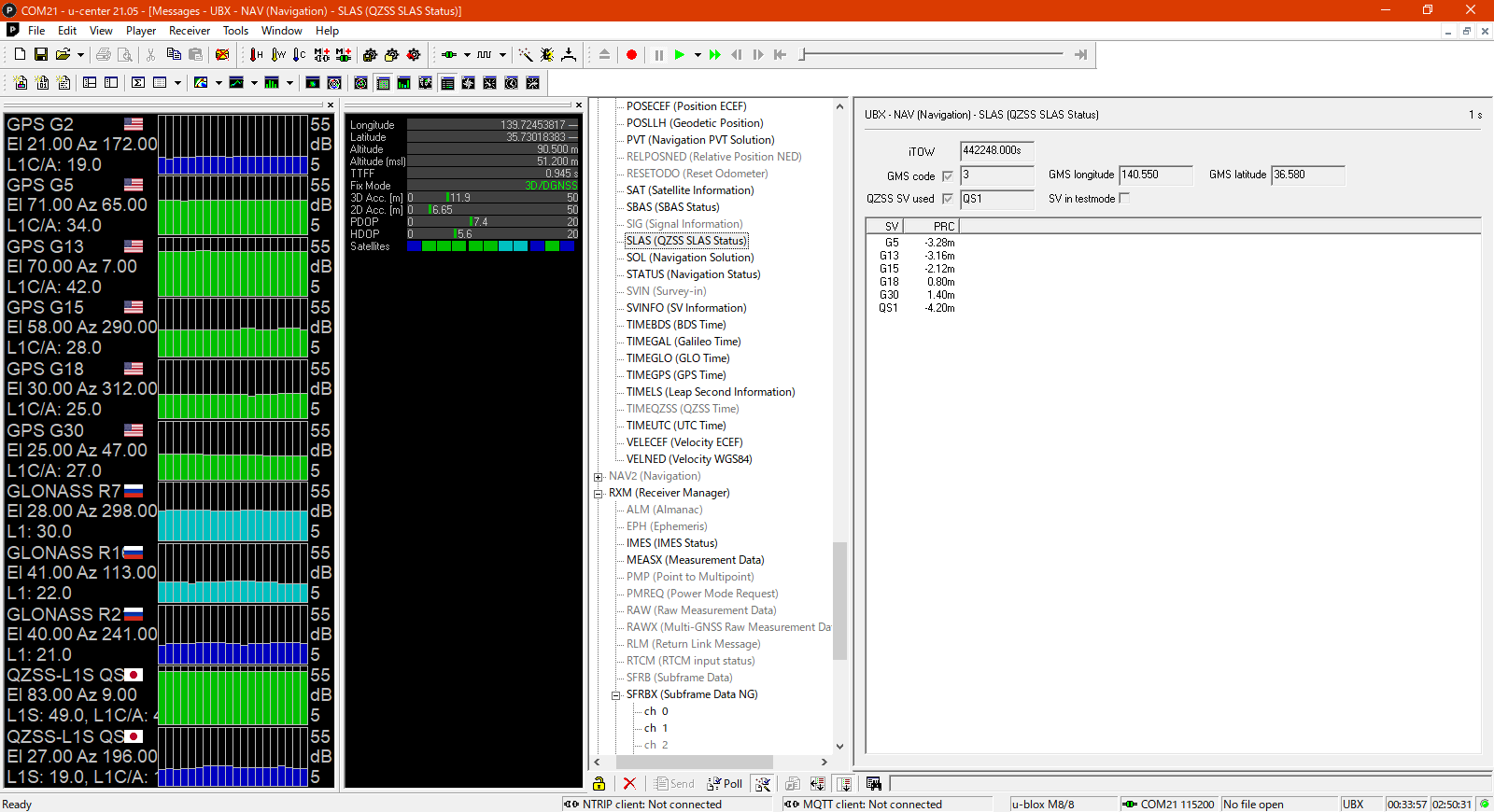
QZSS L1S SLAS
QZSS SLAS(Sub meter Level Augmentation Service)は、GPSとQZSS衛星の疑似距離の補正データを提供する拡張技術です。
SLASを有効にすると、GR 8017はユーザーの要求に基づいて、最適な地上監視局(GMS)を自律的に選択します。
そして、このGMSの補正ストリームを測定値に適用し、位置を改善します。
生の測定データは受信機がデータビットの同期と週の時間を確立すると利用可能になります。
メッセージ・データは、データ・ビットとフレームの同期をとるのに十分なレベルで追跡されたすべての信号について利用可能です。
フレーム同期を実現するのに十分なレベルで追跡されたすべての信号について、メッセージデータが利用できます。
UDR
NEO-M8UをベースとしたGR-8017のUntethered Dead Reckoning(UDR)ソリューションは、GNSSが使えない場所や短時間のGNSS停止時にも優れたナビゲーション性能を発揮します。UDRは、慣性航法装置(INS)とGNSS計測を統合したSFDR(Sensor Fusion Dead Reckoning)技術をベースにしています。INSは、慣性計測ユニット(IMU)によって感知された角速度と特定の力を統合します。INSは、位置、速度、姿勢の変化を計算し、初期化されれば正確なナビゲーション情報を提供することができる。しかし、慣性のみのナビゲーションソリューションでは、IMUの観測値に誤差が生じるため、時間の経過とともに劣化してしまいます。INSとGNSS測定を統合することで、INSを較正することにより、時間とともに増大する誤差を抑えることができます。このようにして得られたINS/GNSS統合フィルター(以下、フュージョン・フィルターと呼ぶ)は、スタンドアローンのGNSS測位と比較して、以下のような利点がある。
GNSSが使えない状況でのナビゲーション性能の向上:マルチパスによる誤差
マルチパスや信号が弱い状態でも、IMUの補助により誤差が軽減されます。
短時間のGNSS停止時のナビゲーションソリューション:トンネルや駐車場などで発生する短時間のGNSSギャップをINSが埋めます。
NEO-M8Uを搭載した「GR-8017」は、GNSSとIMUの測定値を組み合わせ、最大2Hzのレートでポーションソリューションを算出します。これらのソリューションは、標準的なNMEA、UBX-NAV-PVT!および関連メッセージで報告されます。新しいHigh Navigation Rate出力メッセージ(UBX-HNR-PVT)は、これらの結果をIMUのみのデータで拡張し、最大30Hzのレートで正確かつ低レイテンシーの位置ソリューションを提供します。
推測航法では、モジュールに電源を投入すると同時に(つまり、GNSSの固定が確立する前に)、以下のすべての条件を満たす場合にナビゲーションを開始することができます。
モジュールに電源が供給されていない状態で車両が移動していないこと
車両が最後に使用されたときに、少なくともデッドレコニング固定が可能であった。
車両が最後に使用されたときからモジュールにバックアップ電源が供給されている。
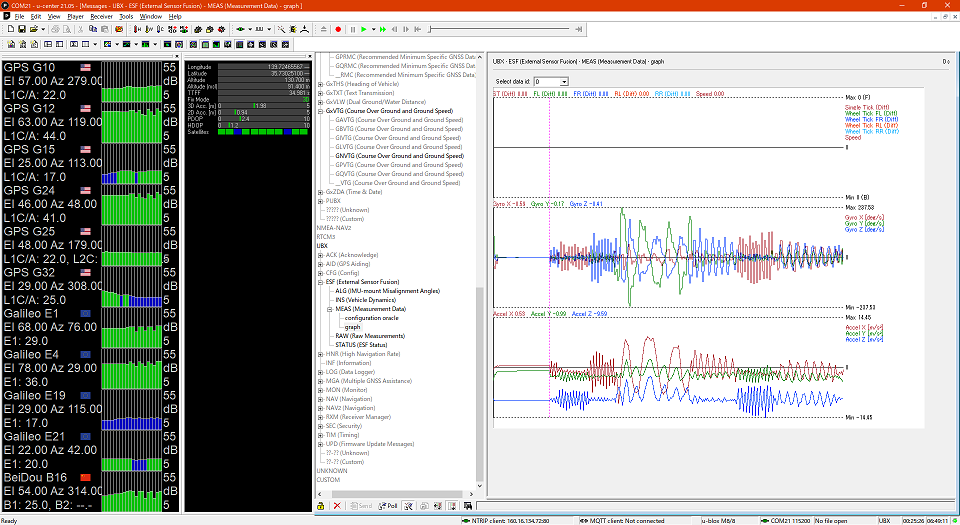
後処理用のセンサデータは,ESF(External Sensor Fusion)クラスのメッセージ UBX-ESF-MEAS および UBX-ESF-RAW(high rate)から取得できます。各メッセージには、測定時刻が含まれています。
!
このドキュメントの uu--blox のバイナリ・メッセージは、「uu--blox M8 Receiver Description blox M8 Receiver Description Including Protocol Specificationプロトコル仕様を含む」で説明されていますが、「4.74.7」を参照してください。
うるう秒補正
原子時計と地球の自転が同期しているため、数年ごとにうるう秒の調整が行われます。
通常このような調整は、チップ発売前に校正されます。
チップ発売後も複数回のうるう秒調整が行われる可能性があります。チップは
このようなうるう秒の調整は、チップが正確な時計とうるう秒の情報を取得した後、自動的に行われます。
閏秒が調整されたかどうかを知るには以下のバイナリコマンドを問い合わせ (UBX NAV TIMEGP S)
B5 62 01 20 00 00 21 64
チップは次の2つのようなバイナリメッセージを返します。
チップは次の2つのようなメッセージを返します。
B5 62 01 20 10 00 80 09 47 07 87 6a 06 00 22 07 0f 03 0c 00 00 46 500c 00 00 46 50
B5 62 01 20 10 00 60 db 56 07 ac 5f ff f 22 07 10 07 09 00 00 18 4509 00 00 18 45
bytの値を確認します。
赤色で表示されている18バイトの値を確認し、その値が07であれば、GPS時刻調整済み
それ以外の場合(例:3, 1, 0)(例:3, 1, 0)では、未調整です。
※在庫切れの場合 入荷後発送となります。 約2か月






